



Projekt Robota Pająka – SpdrBot
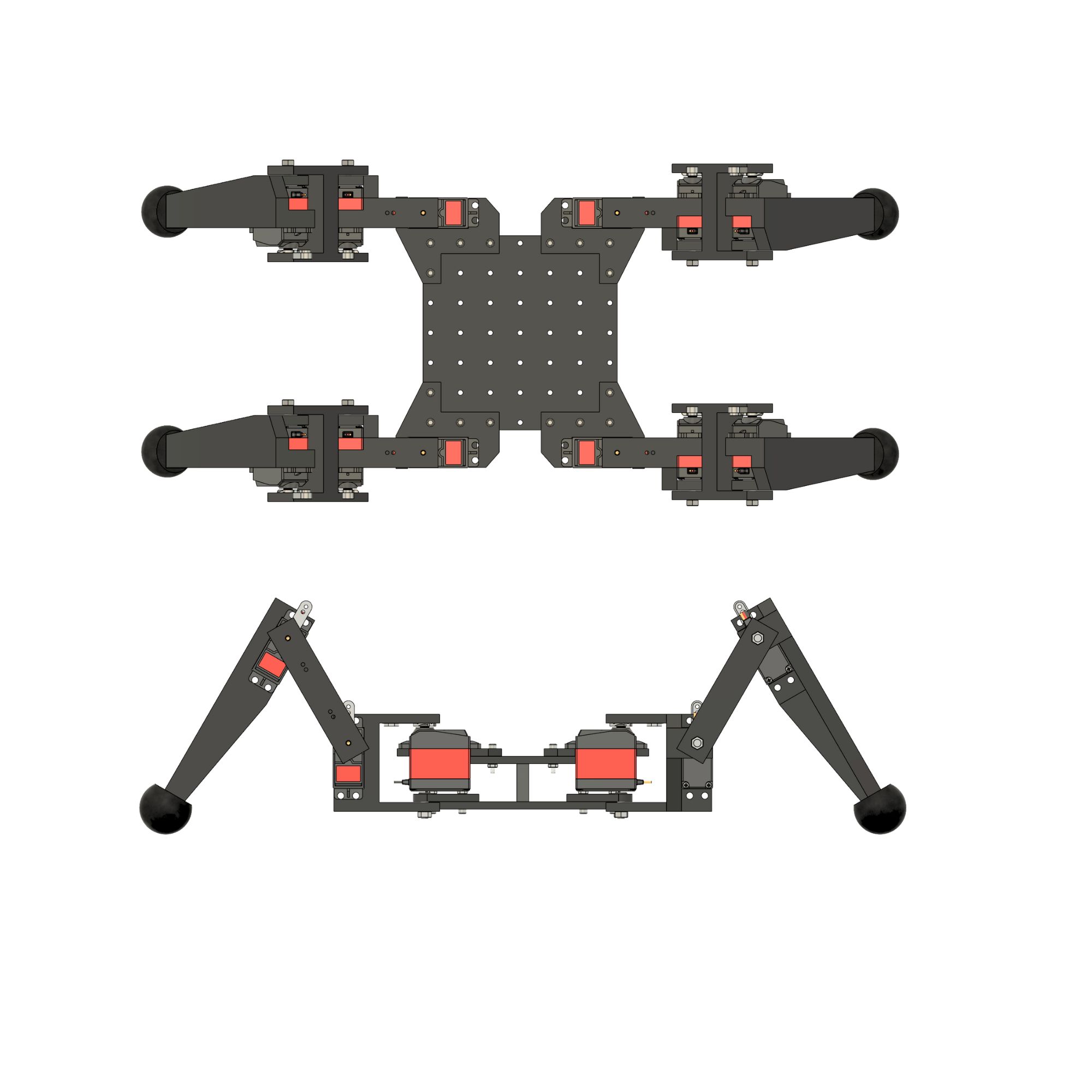
SpdrBot to czteronożny robot kroczący inspirowany pająkiem, stworzony z myślą o majsterkowiczach, studentach i pasjonatach robotyki. Zbudowany w oparciu o 12 serwomechanizmów i w pełni drukowalny w 3D, doskonale nadaje się zarówno do fizycznego prototypowania, jak i zaawansowanej symulacji w NVIDIA Isaac Sim.
49,00 zł z VAT
🕷️ SPDR Bot – czteronożny robot wydrukowany na drukarce 3D
Zbuduj własnego robota kroczącego, dostosuj go do swoich potrzeb i trenuj w symulacji za pomocą IsaacSim i IsaacLab.
Chciałbyś stworzyć własnego robota chodzącego – trochę jak te od Boston Dynamics, ale możliwego do wykonania w domu przy użyciu drukarki 3D i odrobiny kodu?
Poznaj SPDR Bot – czteronożnego, pająkopodobnego robota zaprojektowanego z myślą o majsterkowiczach, hobbystach i pasjonatach robotyki, którzy chcą wejść w świat nowoczesnych technologii bez wydawania fortuny.
Całość zaprojektowałem od zera w programie Fusion.
Robot korzysta z 12 serwomechanizmów (po 3 na każdą nogę), a jego obudowa jest na tyle pojemna, że bez problemu zmieścisz w niej Jetson Nano lub lżejszy komputer, np. Raspberry Pi Pico.
Każdy element jest przystosowany do druku FDM, przetestowany w PETG i zaprojektowany tak, by złożenie robota było proste nawet dla początkujących.
Ale SPDR Bot to coś więcej niż tylko ładny projekt – to pełnoprawna platforma do nauki i eksperymentów.
Możesz nauczyć go chodzić w NVIDIA Isaac Sim, korzystając z uczenia ze wzmocnieniem. Dzięki obsłudze URDF konstrukcja jest gotowa do symulacji fizyki i treningów opartych na sztucznej inteligencji.
⚠️ To produkt cyfrowy!
Po zakupie otrzymasz e-mail z kompletem plików do pobrania.

🎁 Co Dostaniesz za Darmo
Chcesz tylko pobawić się symulacją albo spróbować uczenia ze wzmocnieniem w Isaac Sim?
Masz szczęście — pliki URDF i konfiguracja symulacji są całkowicie darmowe i dostępne na moim GitHubie:
👉 github.com/indystrycc/spdrbot
Znajdziesz tam wszystko, czego potrzebujesz, aby wczytać robota do Isaac Sim, sterować przegubami, testować algorytmy ruchu, a nawet wytrenować własną strategię chodzenia.
Idealne rozwiązanie, jeśli bardziej interesuje Cię kod niż kable.
✅ W pakiecie znajdziesz:
-
Pliki STL i 3MF wszystkich części do druku 3D (przetestowane i gotowe do druku)
-
Plik projektu Fusion 360 (.f3d) do własnych modyfikacji i personalizacji
-
Kompletny model złożeniowy w formacie STEP (.step) – łatwy import do dowolnego oprogramowania CAD
-
Kod MicroPython używany na Raspberry Pi Pico do sterowania serwomechanizmami

💡 Cechy SPDR Bot:
-
Czteronożny projekt: Inspirowany naturą, zaprojektowany z myślą o równowadze i elastyczności
-
12-serwomechanizmowy napęd: Chodź, czołgaj się lub balansuj – wszystko zależy od Twojego algorytmu
-
Edytowalny w Fusion 360: Zmieniaj ramę, dodawaj sensory, przestawiaj „mózg” robota – łatwa personalizacja
-
Zgodny z zasadami ORP: Główne płyty robota zaprojektowane zgodnie z wytycznymi OpenRoboticPlatform
-
Workflow „najpierw symulacja”: Testuj ruchy i trenuj zachowania w Isaac Sim zanim dotkniesz prawdziwego sprzętu
-
Łatwy montaż dla początkujących: Bez egzotycznych narzędzi czy materiałów. Wystarczą podstawowe śrubki, tester serw, opaski kablowe i odrobina cierpliwości
🔧 Wymagania techniczne:
-
12 × serwa 25 kg/cm (zalecane)
-
Jetson Nano lub Raspberry Pi Pico + kontroler serw (np. płytka PCA9685)
-
Standardowy filament PETG lub PLA+
-
Opcjonalnie: TPU na elastyczne stopy
-
Symulacja: NVIDIA Isaac Sim / Isaac Lab (RTX GPU wymagane, jeśli chcesz pełnej mocy)
👨🔬 Dla kogo jest SPDR Bot?
-
Majsterkowicze szukający technicznego, ale zabawnego wyzwania
-
Nauczyciele i studenci uczący się lub uczący robotyki
-
Entuzjaści AI i symulacji chcący eksperymentować z uczeniem ze wzmocnieniem
-
Użytkownicy Fusion 360 chcący modyfikować, ulepszać i przerabiać projekt

Podobne produkty
-
CNC A Sketch – Kompletna Instrukcja Budowy
39,00 zł z VAT -


Stojak na Filament
20,00 zł z VAT -


Projekt robota na gąsienicach
49,00 zł z VAT
 Brak produktów w koszyku.
Brak produktów w koszyku.